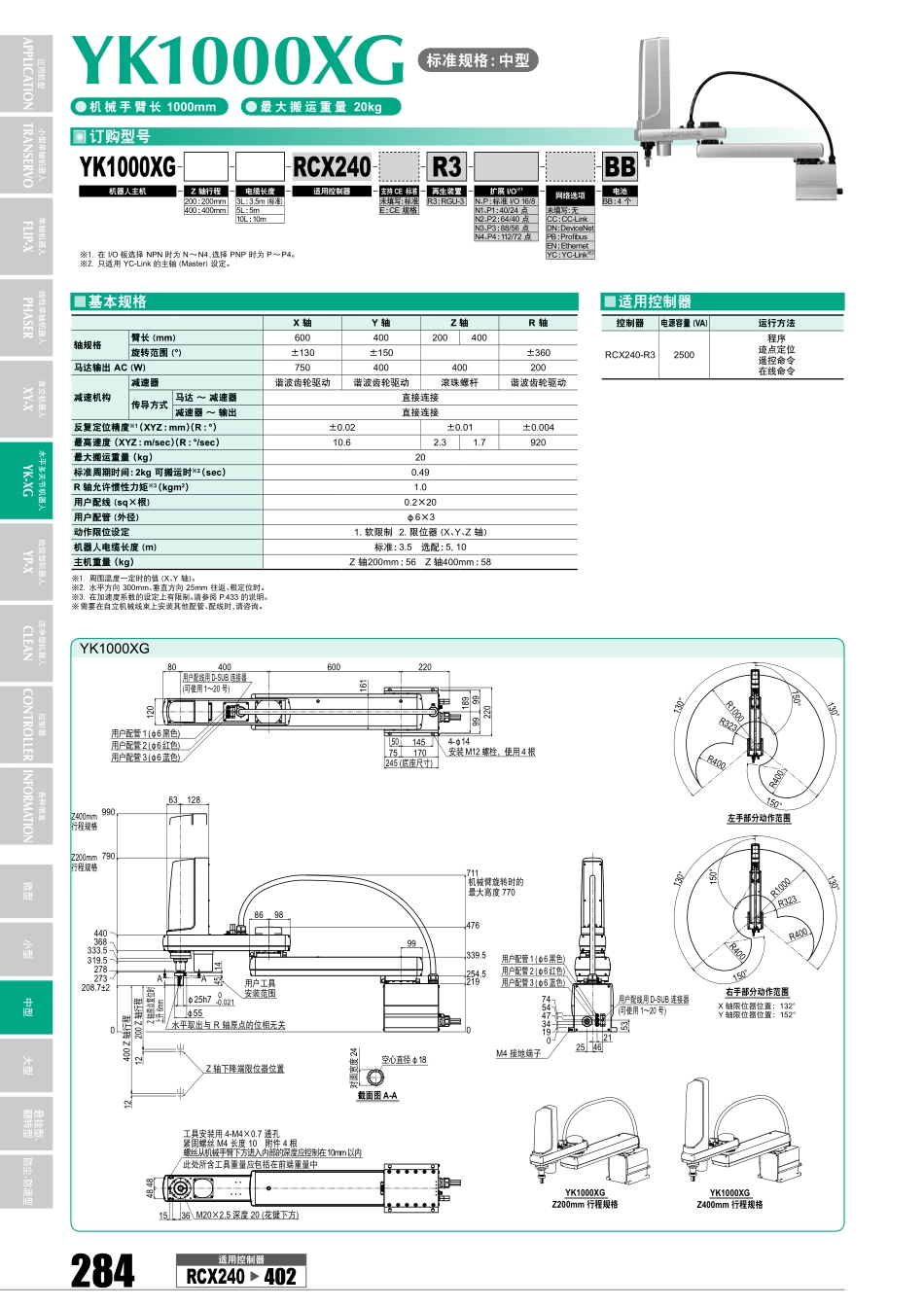
应用机型APPLICATION小型单轴机器人TRANSERVO单轴机器人FLIP-X线性单轴机器人PHASER直交机器人XY-X水平多关节机器人YK-XG拾放型机器人YP-X洁净型机器人CLEAN控制器CONTROLLER各种信息INFORMATION284微型小型中型大型悬挂型、翻转型防尘、防滴型YK1000XG控制器电源容量(VA)运行方法RCX240-R32500程序迹点定位遥控命令在线命令X轴Y轴Z轴R轴轴规格臂长(mm)600400200400—旋转范围(°)±130±150—±360马达输出AC(W)750400400200减速机构减速器谐波齿轮驱动谐波齿轮驱动滚珠螺杆谐波齿轮驱动传导方式马达~减速器直接连接减速器~输出直接连接反复定位精度※1(XYZ:mm)(R:°)±0.02±0.01±0.004最高速度(XYZ:m/sec)(R:°/sec)10.62.31.7920最大搬运重量(kg)20标准周期时间:2kg可搬运时※2(sec)0.49R轴允许惯性力矩※3(kgm2)1.0用户配线(sq×根)0.2×20用户配管(外径)φ6×3动作限位设定1.软限制2.限位器(X、Y、Z轴)机器人电缆长度(m)标准:3.5选配:5,10主机重量(kg)Z轴200mm:56Z轴400mm:58※1.周围温度一定时的值(X、Y轴)。※2.水平方向300mm、垂直方向25mm往返、粗定位时。※3.在加速度系数的设定上有限制。请参阅P.433的说明。※需要在自立机械线束上安装其他配管、配线时,请咨询。YK1000XGーーーRCX240ーーR3ーーーBB机器人主机ーZ轴行程ー电缆长度ー适用控制器ー支持CE标准ー再生装置ー扩展I/O※1ー网络选项ー电池200:200mm3L:3.5m(标准)未填写:标准R3:RGU-3N、P:标准I/O16/8BB:4个400:400mm5L:5mE:CE规格N1、P1:40/24点未填写:无10L:10mN2、P2:64/40点CC:CC-LinkN3、P3:88/56点DN:DeviceNetN4、P4:112/72点PB:ProfibusEN:Ethernet※1.在I/O板选择NPN时为N~N4,选择PNP时为P~P4。YC:YC-Link※2※2.只适用YC-Link的主轴(Master)设定。●机械手臂长●最大搬运重量标准规格:中型1000mm20kgYK1000XGZ200mm����Z400mm����4812333.53689900273278319.5790440400Z���12200Z���208.7±2�5545��������Z���������14�25h70-0.021Z��������6mm������R��������������18����24�����������7700254.5711339.54762199998861286316122080����1(�6��)����2(�6��)�����D-SUB���(���1�20�)����3(�6��)120600400994-�14��M12�����4�7550145170245(����)18999220���A-AM20�2.5��20(...