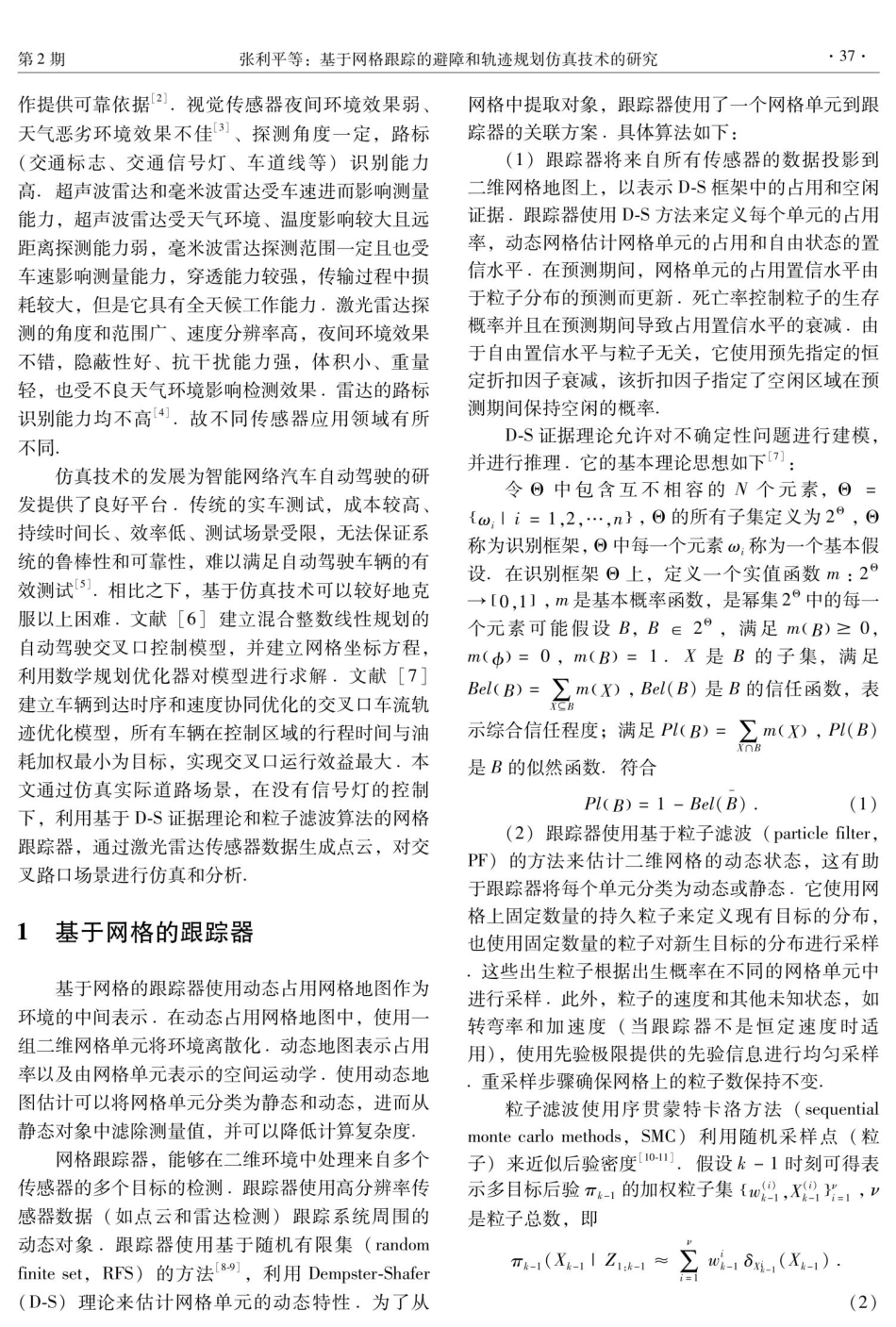
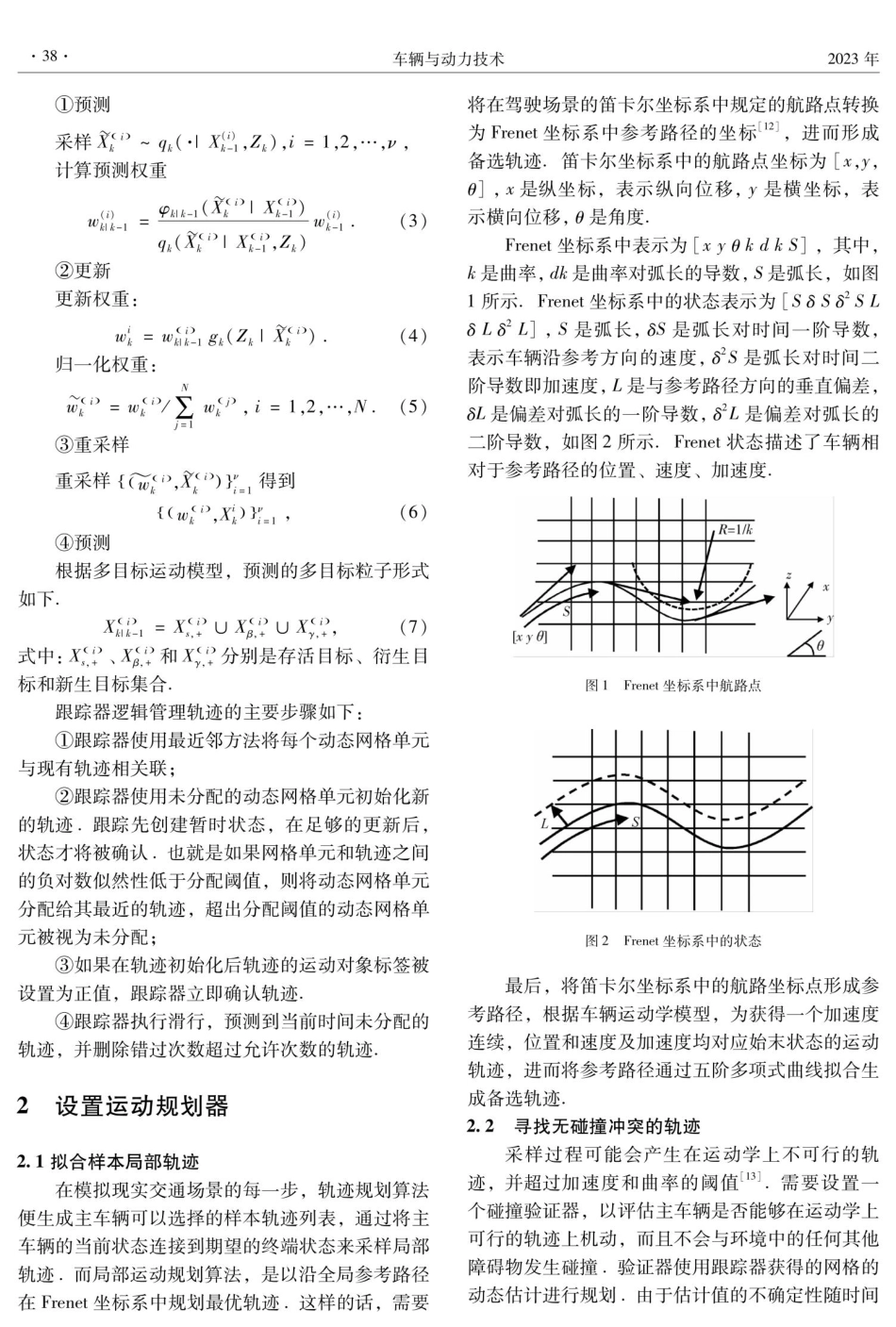
车辆与动力技术2023年第2期Vehicle&PowerTechnology文章编号:1009-4687(2023)02-0036-07总第170期基于网格跟踪的避障和轨迹规划仿真技术的研究张利平,赵俊梅,文刘丹,陈昌鑫,田悦(中北大学电气与控制工程学院,太原030051)摘要:基于网格的跟踪器能够融合激光雷达等高分辨率传感器的数据,使用动态占用网格地图估计来找到最佳的行驶轨迹.跟踪器的工作是使用传感器测量数据来估计运动对象的数量及其相应的状态,例如位置、速度、加速度和尺寸.跟踪器使用Dempster-Shafer(D-S)证据理论定义每个网格单元的占用率,利用粒子滤波算法估计每个网格单元的状态,基于粒子分布的预测,使网格的占据置信水平更新,进而获得全局参考路径在Frenet坐标系中最优规划轨迹.最后,通过仿真平台,模拟无交通信号灯的十字形交叉路口的现实场景,进行了大量的仿真实验,证明网格跟踪算法的有效性、实用性.关键词:网格跟踪;避障;轨迹规划;粒子滤波;中图分类号:TP391;U491ResearchonObstacleAvoidanceandTrajectoryPlanningSimulationTechnologyBasedonGridTracking文献标识码:AZHANGLiping,2(SchoolofElectricalandControlEngineering,NorthUniversityofChina,Taiyuan030051,China)Abstract:Thegrid-basedtrackercanfusethedatacollectedbyhigh-resolutionsensorssuchasLiDARandusedynamicoccupancygridmapestimationtofindthebestdrivingpath.Thetrackerusesthesensormeasurementdatatoestimatethenumberofmovingobjectsandtheircorrespondingstates,suchasposition,speed,acceleration,andsize.ItappliestheD-Sevidencetheorytodefinetheoccupancyrateofeachgridcellandtheparticlefilteralgorithmisusedtoestimatethestateofeachgridcell.Basedonthepredictionofparticledistribution,theoccupancyconfidencelevelofthegridisupdated,andthentheoptimalplanningtrajectoryoftheglobalreferencepathintheFrenetcoordinatesystemisobtained.Finally,thesimulationplaformisusedtosimulatetherealsceneofintersectionswithouttrafficlights,andalargenumberofsimulationexperimentsarecarriedouttoprovetheeffectivenessandpracticabilityofthegridtrackingalgorithm.Keywords:gridtracking;avoidobstacles;trackplanning;particlefilter车辆的智能化、电动化、共享化、网联化是智能汽车的发展趋势,智能网联汽车的自动驾驶技术逐步改变大家的出行方...