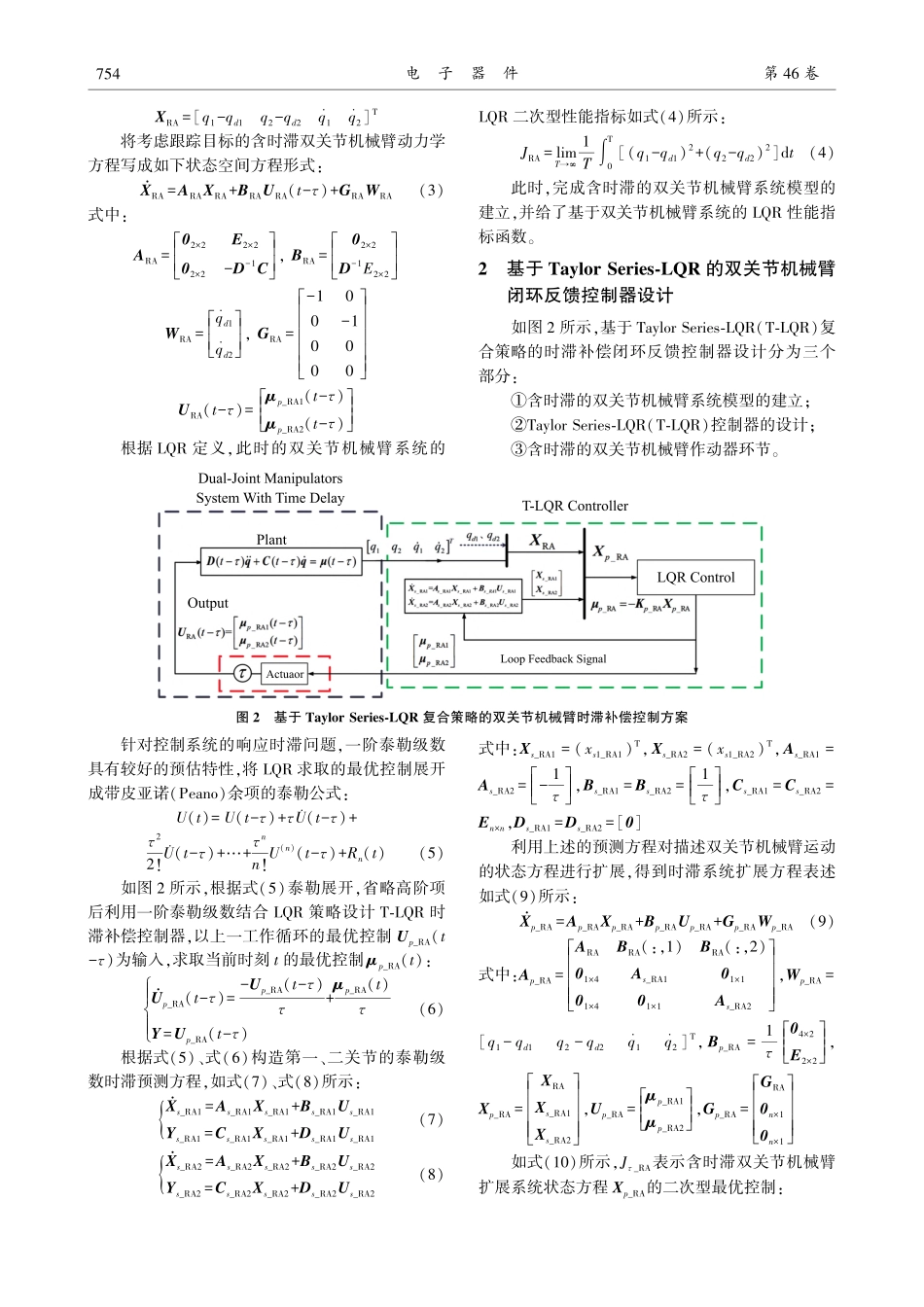
第46卷第3期2023年6月电子器件ChineseJournalofElectronDevicesVol.46No.3June2023项目来源:国家自然科学基金项目(52072158)收稿日期:2021-12-24修改日期:2022-02-16TaylorSeries⁃LQRCompoundStrategyBasedTime⁃delayCompensationControlforDual⁃JointManipulators∗CHENShi’an∗,LIUJinyu(CollegeofAutomobileandTransportationEngineering,JiangsuUniversity,ZhenjiangJiangsu212013,China)Abstract:Tosolvetheproblemoffluttercausedbytimedelay,atimedelaycompensationcontrolmethodfordual⁃jointmanipulatorsbasedonTaylorSeries⁃LinearQuadraticRegulator(LQR)compoundstrategyisproposed.Firstly,twofirst⁃orderTaylorseriesareutilizedtoconstructpredictionequationsusingthecurrentidealcontrolforcesofthetwomanipulatorstocalculatethepredictivecontrolforceatthenexttimedelay.Then,thesetwopredictionequationsareusedtoaugmentthesystemstateequationdescribingthedual⁃jointmanipulatorsmotion.Finally,aLQRbasedtime⁃delaycompensationpredictivecontrollerisdesignedtoobtainthepredictivecontrolforce.Theapplicationresultsshowthat,asthetimedelayincreases,flutterofthedouble⁃jointmani...