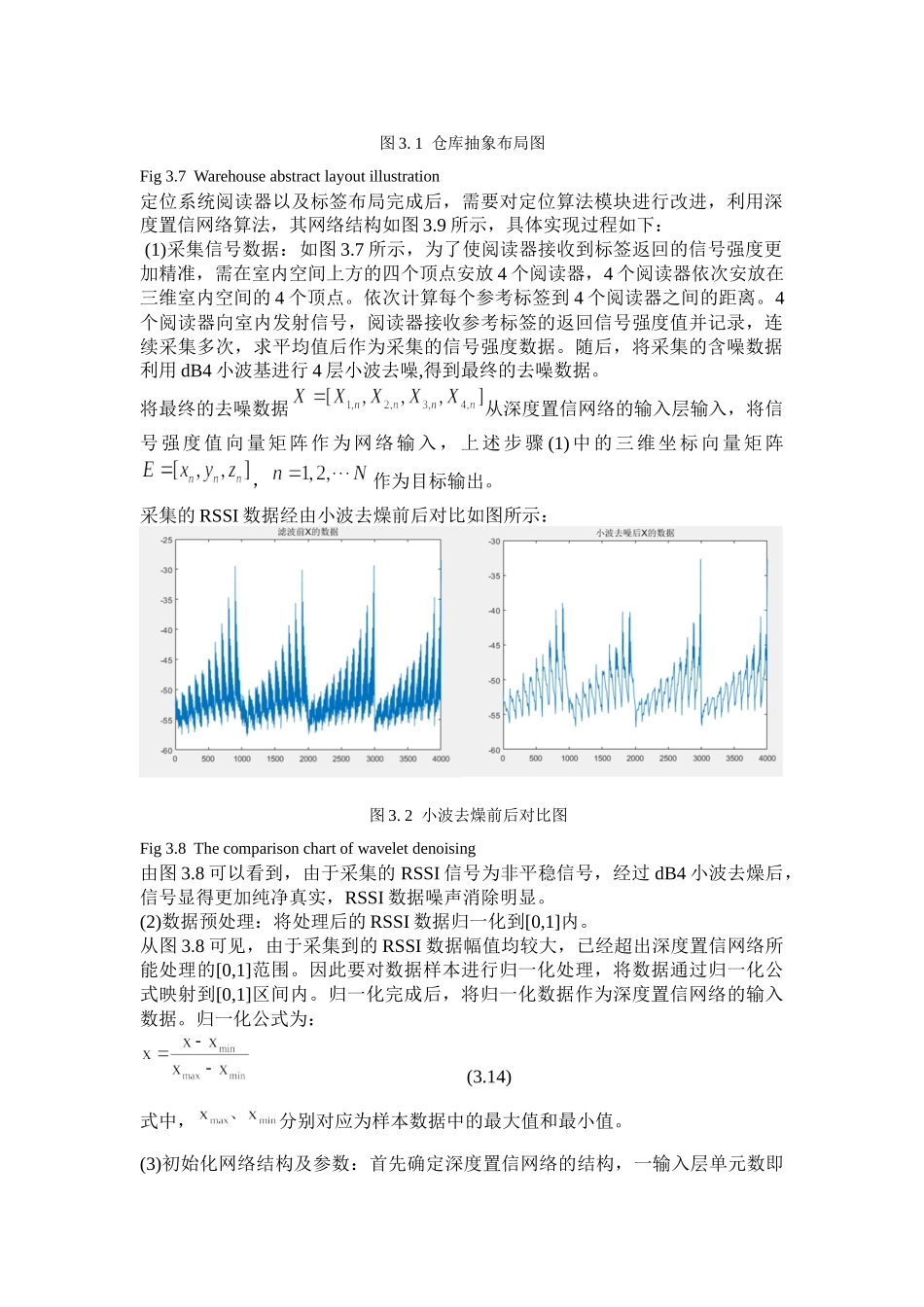
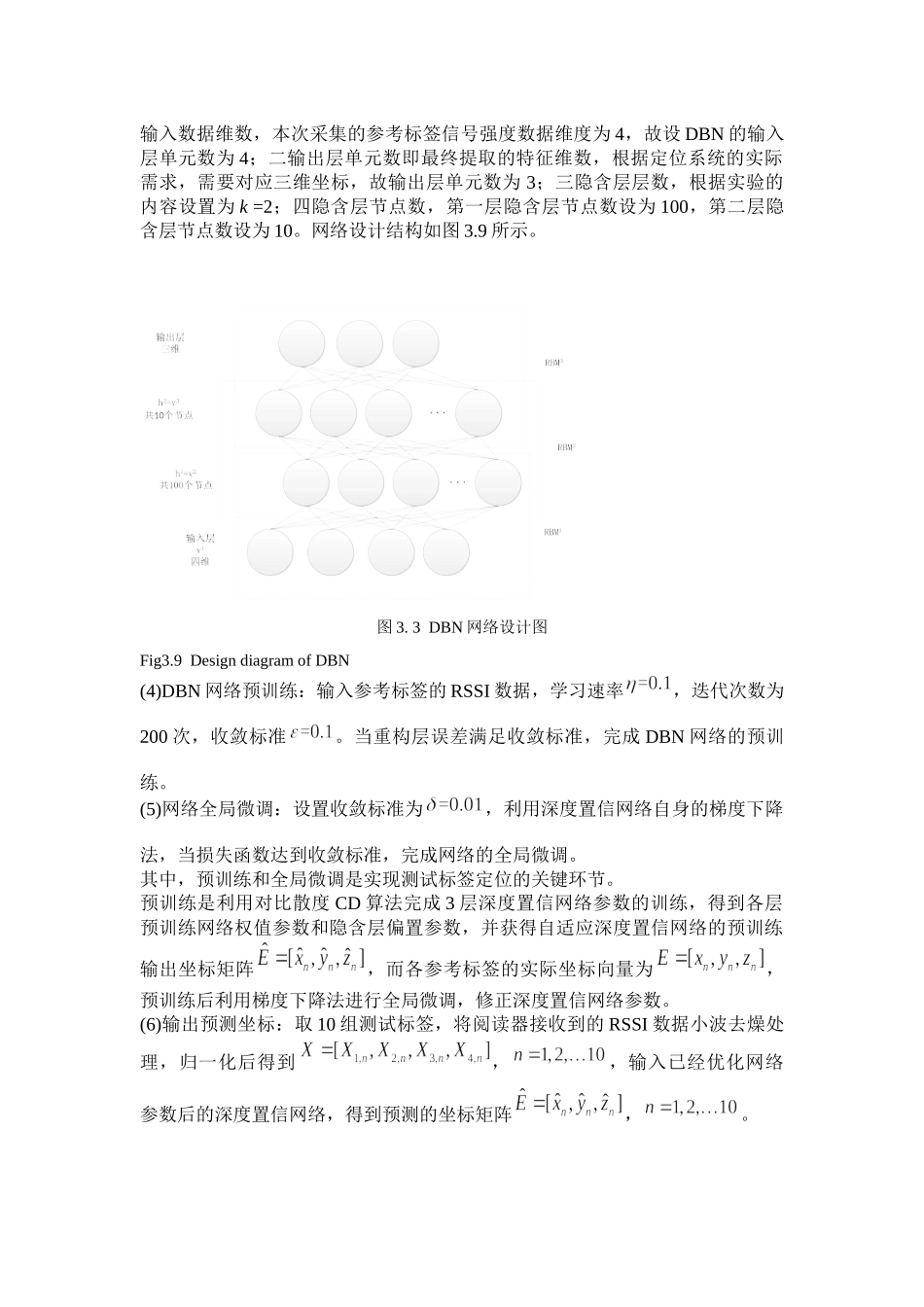
图3.1仓库抽象布局图Fig3.7Warehouseabstractlayoutillustration定位系统阅读器以及标签布局完成后,需要对定位算法模块进行改进,利用深度置信网络算法,其网络结构如图3.9所示,具体实现过程如下:(1)采集信号数据:如图3.7所示,为了使阅读器接收到标签返回的信号强度更加精准,需在室内空间上方的四个顶点安放4个阅读器,4个阅读器依次安放在三维室内空间的4个顶点。依次计算每个参考标签到4个阅读器之间的距离。4个阅读器向室内发射信号,阅读器接收参考标签的返回信号强度值并记录,连续采集多次,求平均值后作为采集的信号强度数据。随后,将采集的含噪数据利用dB4小波基进行4层小波去噪,得到最终的去噪数据。将最终的去噪数据从深度置信网络的输入层输入,将信号强度值向量矩阵作为网络输入,上述步骤(1)中的三维坐标向量矩阵,作为目标输出。采集的RSSI数据经由小波去燥前后对比如图所示:图3.2小波去燥前后对比图Fig3.8Thecomparisonchartofwaveletdenoising由图3.8可以看到,由于采集的RSSI信号为非平稳信号,经过dB4小波去燥后,信号显得更加纯净真实,RSSI数据噪声消除明显。(2)数据预处理:将处理后的RSSI数据归一化到[0,1]内。从图3.8可见,由于采集到的RSSI数据幅值均较大,已经超出深度置信网络所能处理的[0,1]范围。因此要对数据样本进行归一化处理,将数据通过归一化公式映射到[0,1]区间内。归一化完成后,将归一化数据作为深度置信网络的输入数据。归一化公式为:(3.14)式中,分别对应为样本数据中的最大值和最小值。(3)初始化网络结构及参数:首先确定深度置信网络的结构,一输入层单元数即输入数据维数,本次采集的参考标签信号强度数据维度为4,故设DBN的输入层单元数为4;二输出层单元数即最终提取的特征维数,根据定位系统的实际需求,需要对应三维坐标,故输出层单元数为3;三隐含层层数,根据实验的内容设置为k=2;四隐含层节点数,第一层隐含层节点数设为100,第二层隐含层节点数设为10。网络设计结构如图3.9所示。图3.3DBN网络设计图Fig3.9DesigndiagramofDBN(4)DBN网络预训练:输入参考标签的RSSI数据,学习速率,迭代次数为200次,收敛标准。当重构层误差满足收敛标准,完成DBN网络的预训练。(5)网络全局微调:设置收敛标准为,利用深度置信网络自身的梯度下降法,当损失函数达到收敛标准,完成网络的全局微调。其中,预训练和全局微调是实现测试标签定位的关键环节。预训练是利用对比散度CD算法完成3层深度置信网...