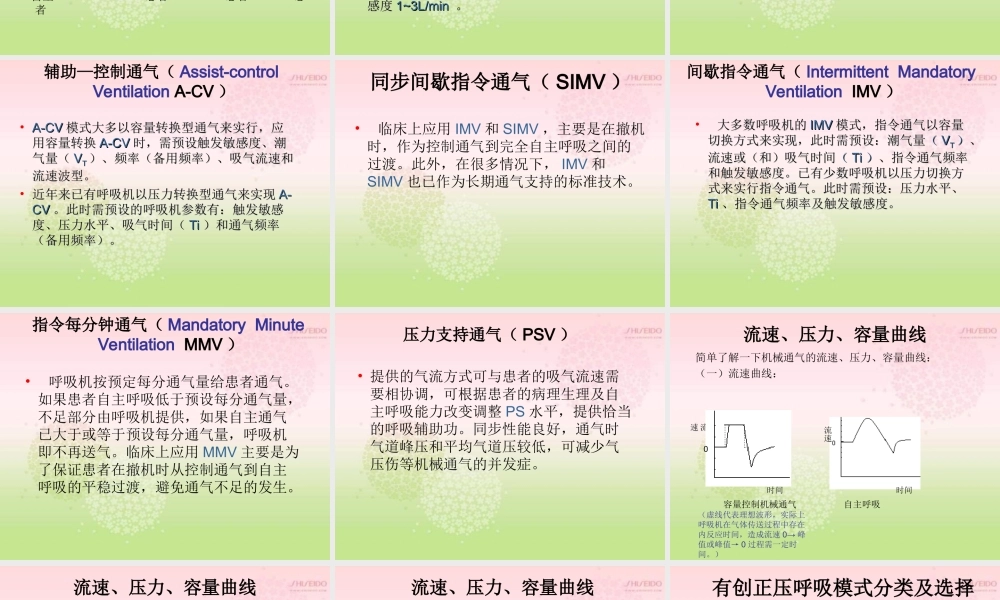
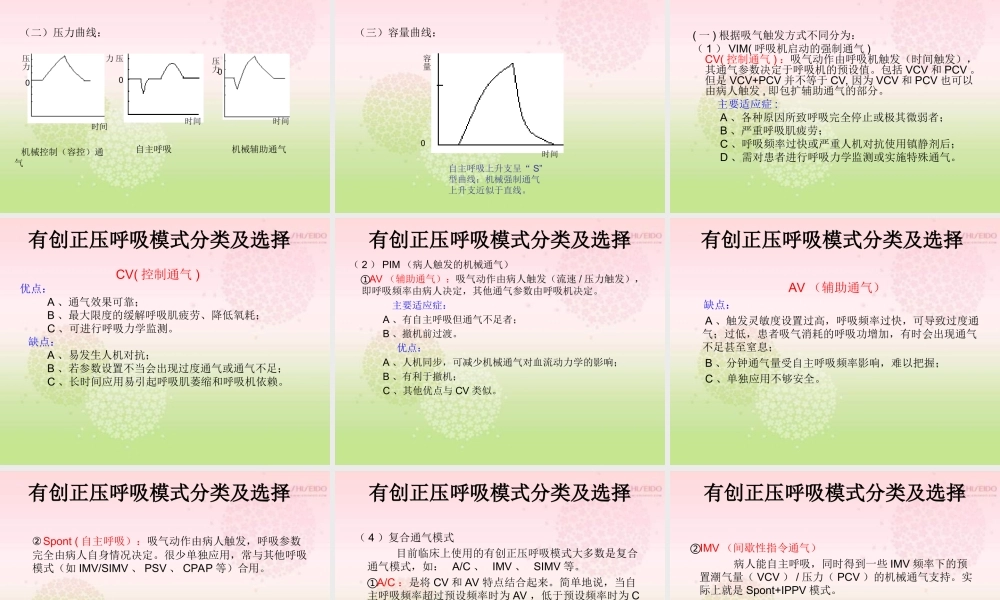
有创呼吸机的工作模式及选择有创呼吸机的工作模式及选择有创正压呼吸模式发展简史(1)•1775年:Hunter用风箱将气体吹入患者肺中,有创正压通气真正意义上诞生。•1775-1940年期间:由于技术落后和战乱,呼吸机发展缓慢,装置简易,多数采用间歇性正压通气模式(IPPV)。•1950S:脊灰在世界范围大流行,定压型呼吸机被广泛应用,现代呼吸机技术有长足的进步。•1960S:随着物理学发展,电子技术被引进机械通气中,人们设计出定容型呼吸机。•60年代末:越战爆发,许多伤员出现“ARDS”,临床上应用IPPV难以纠正低氧血症,1967年,Ashbaugh首次应用呼气末正压(PEEP)治疗ARDS获得满意效果;1971年Gregory应用持续气道正压通气(CPAP)治疗新生儿呼吸窘迫综合征获得成功。有创正压呼吸模式发展简史(2)•1970S:陆续出现了间歇性指令通气(IMV),同步间歇性指令通气(SIMV)。分钟指令通气(MMV)等模式。•1980S:人们开始重视定容型呼吸机易发生气压伤的缺点,又开发压力支持通气模式(PSV)。•1992年:由于微电脑技术的应用,压力调节容量控制通气(PRVCV)得以实现,使机械通气更符合人的生理状态,疗效更理想。•1992年至今:适应性支持通气(ASV),容量支持通气(VSV),比例辅助通气(PAV)等一系列新的通气模式不断出现,有创正压通气前景光明。各种通气模式的定义及其特点各种通气模式的定义及其特点机械呼吸类型可分为四类:指令(控制)、辅助、支持和自主呼吸。分类依据有3点:由什么来触发通气,通气期间吸气流速由什么来限制,通气由什么来切换。“触发”可由机器定时(控制通气)或有患者用力来启动(辅助、支持或自主通气)。“限制”一般是靠设置流量(压力可变)或设置压力(流量可变)来进行。“切换”一般是靠设置容量、时间或流量来进行。所谓“机械通气模式”,实际上就是指令,辅助、支持和自主呼吸的理想结合和不同组合由机器和患者控制时相的变化特殊结合来定义呼吸类型通气方式触发限制切换指令(控制)机器机器机器辅助患者机器机器支持患者机器患者自主患者患者患者辅助通气(AssistedVentilationAV)•AVAV是在患者吸气用力时依靠气道压的降低(压力是在患者吸气用力时依靠气道压的降低(压力触发)或流量的改变(流量触发)来触发,触发触发)或流量的改变(流量触发)来触发,触发后呼吸机即按预设潮气量(或吸气压力)、频率、后呼吸机即按预设潮气量(或吸气压力)、频率、吸气和呼气时间将气体传送给患...